Stereo image processing for the CASSIS camera - ExoMars Trace Gas Orbiter
Event details
| Date | 29.10.2015 |
| Hour | 17:00 › 18:00 |
| Speaker | Stepan Tulyakov, EPFL |
| Location | |
| Category | Conferences - Seminars |
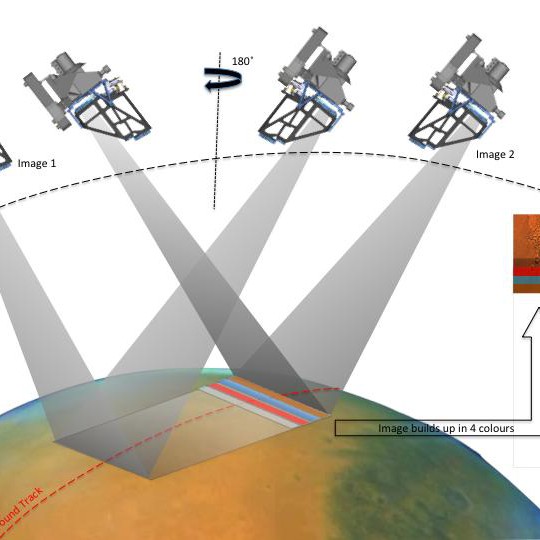
The 2016 Mars mission is ESA-led and launched by Roskosmos. ESA will provide a Mars orbiter and an Entry, Descent and Landing (EDL) demonstrator. CaSSIS (Colour and Stereo Surface Imaging System), is a high resolution imaging system designed to complement the data acquired by the other payload on EMTGO while also enhancing our knowledge of the surface of Mars by extending the observations of the High Resolution Imaging Science Experiment (HiRISE) which is currently orbiting Mars onboard NASA’s Mars Reconnaissance Orbiter (MRO). One of the goals of the project is to produce high-resolution 3D models of Mars surface.
These 3D models will allow scientists to
(1) identify potential sources of trace gases,
(2) examine dynamic processes on surface and
(3) evaluate landing sites for future missions.
This presentation gives short overview of TGO mission, our role in this mission. In particular, the presentation shows results of on-ground geometric calibration of CaSSIS and my current work on preparations for in-flight calibration using star fields. Basic mathematical foundation of the work will be presented as well as results of recent geometric calibration and next steps for data processing and analysis.
About the presenter: Stepan Tulyakov is the PhD Candidate at EPFL Space Engineering centre (eSpace). He received his Master Degree in Robotics from Bauman Moscow State University (2008) and Master Degree in Computer Science from Seoul National University (2010). Before joining eSpace in 2015, he spent 5 years as senior research engineer in Samsung Electronics (South Korea).
These 3D models will allow scientists to
(1) identify potential sources of trace gases,
(2) examine dynamic processes on surface and
(3) evaluate landing sites for future missions.
This presentation gives short overview of TGO mission, our role in this mission. In particular, the presentation shows results of on-ground geometric calibration of CaSSIS and my current work on preparations for in-flight calibration using star fields. Basic mathematical foundation of the work will be presented as well as results of recent geometric calibration and next steps for data processing and analysis.
About the presenter: Stepan Tulyakov is the PhD Candidate at EPFL Space Engineering centre (eSpace). He received his Master Degree in Robotics from Bauman Moscow State University (2008) and Master Degree in Computer Science from Seoul National University (2010). Before joining eSpace in 2015, he spent 5 years as senior research engineer in Samsung Electronics (South Korea).
Links
Practical information
- General public
- Free
- This event is internal
Organizer
- Dr. Anton Ivanov
Contact
- Dr. Anton Ivanov