MEchanics GAthering -MEGA- Seminar: Talk 1 - Sensorized physical twin of a raspberry to develop harvesting robots; Talk 2 - Soft passive swimmer optimization: From simulation to reality using data-driven transformation
Event details
| Date | 31.03.2022 |
| Hour | 16:15 › 17:30 |
| Speaker | Kai Junge (CREATE-LAB, EPFL) & Nana Obayashi (CREATE-LAB, EPFL) |
| Location | Online |
| Category | Conferences - Seminars |
| Event Language | English |
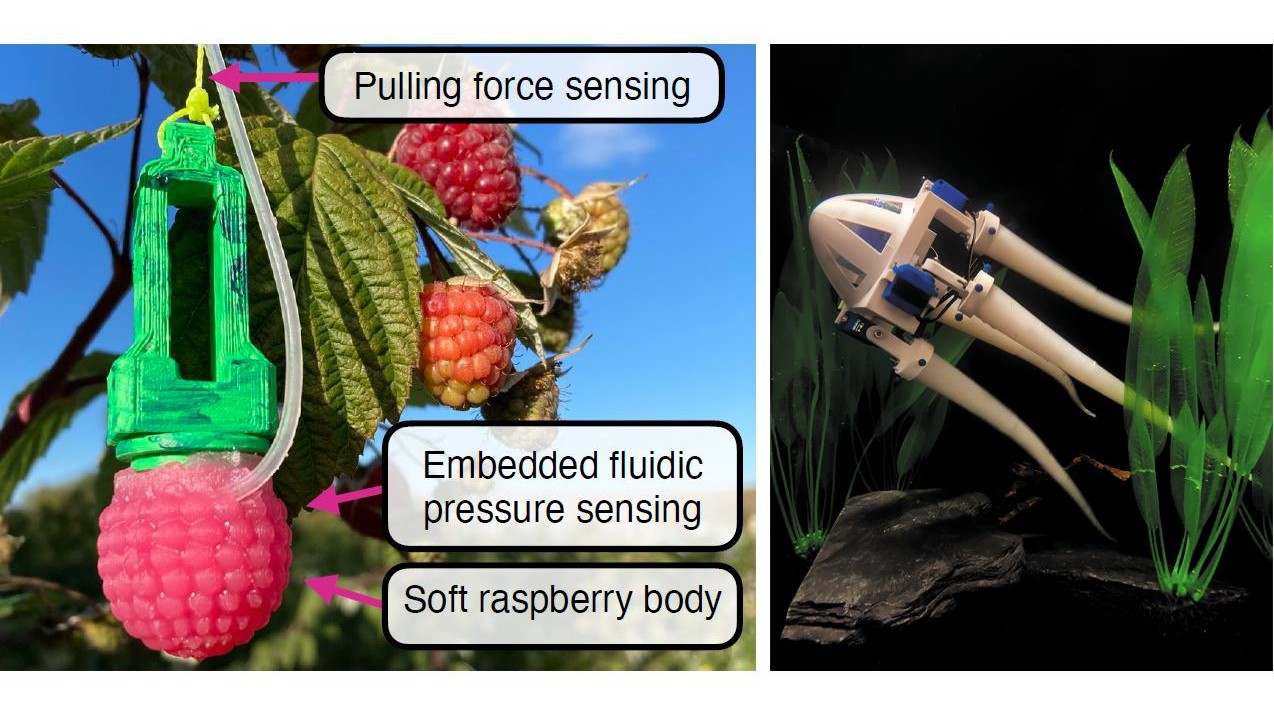
Talk 1: Sensorized physical twin of a raspberry to develop harvesting robots, by Kai Junge (CREATE-LAB, EPFL)
Abstract The use of robotic systems for harvesting of crops is a growing application domain in the agriculture sector. A key challenge is to develop robotic systems to harvest soft fruits such as raspberries which require delicate handling as they are easily damaged. Designing and optimizing a robotic harvesting setup by testing on real raspberry crops can be challenging due to the short natural harvesting period and the cost and logistical challenges of running experiments in the field. To solve this problem, we present a sensorized physical twin of a raspberry which can be used to develop robotic harvesting systems before deploying in the field. The sensorized raspberry has the capability of measuring the applied forces before and after it has been picked off the plant with a high sensitivity. The mechanical design was optimized and a material with properties similar to the real fruit was chosen, in order to achieve similar mechanical properties to a real raspberry, specifically the stiffness before and after picking and the pulling force. The paper concludes with a harvesting demonstration performed by a robotic gripper, where the sensorized raspberry is used to assess the quality of the picking action. This work aims to lay the groundwork for accelerating the future development of robotic harvesting systems to enable robust development in a lab before deployment in the field.
Bio I am a 1st year PhD student at the CREATE Lab (EPFL) working on dexterous robotic manipulation. Originally from Kyoto Japan, I studied engineering (focus on robotics and informatics) at the University of Cambridge, UK for both my bachelors and masters before coming to EPFL. Since a young age, robotics prototyping has been my passion and hobby. At EPFL I have been working on projects related with the fabrication of robot hands, sensor design and characterisation, low level motor control, and optimisation, tying in the practical skills from my hobbies and theoretical background from my past studies.
Talk 2: Soft passive swimmer optimization: From simulation to reality using data-driven transformation, by Nana Obayashi (CREATE-LAB, EPFL)
Abstract Soft, bio-inspired robotic swimmers are showing significant potential in terms of efficient motion and maneuverability. However, modeling and understanding the fluid-structure interactions between compliant soft bodies and water is highly complex, limiting our ability to optimize or understand the effect of both design and controller parameters. We propose combining simulation of soft passive swimming structures with experimental data to improve the accuracy of the simulation by identifying the transformation which best maps the simulation to this experimental data. This allows us to leverage the physics that are captured by the simulations whilst closing the sim-to-real gap by using a limited amount of experimental data. We use this approach to model a simple, modular robotic system based upon passive tentacles and show how we can close the reality gap and optimize the design of the tentacle structures. This optimized structure is used to create a full robot swimmer, where the optimized tentacles can be used to create a robot with a swimming speed of 6.2 cm/s, and can introduce a rudder like 'deflector' to also control the direction of the robot's motion.
Bio Nana Obayashi is a first year PhD student at the CREATE Lab, working with Prof. Josie Hughes. She has bachelor’s and master’s degrees in aerospace engineering from Georgia Institute of Technology, as well as industry experience as an aerodynamics and flight performance engineer. In her PhD, she is focusing on the intersection of fluid dynamics and robotics so we can better design robots that efficiently exploit the environment.
Abstract The use of robotic systems for harvesting of crops is a growing application domain in the agriculture sector. A key challenge is to develop robotic systems to harvest soft fruits such as raspberries which require delicate handling as they are easily damaged. Designing and optimizing a robotic harvesting setup by testing on real raspberry crops can be challenging due to the short natural harvesting period and the cost and logistical challenges of running experiments in the field. To solve this problem, we present a sensorized physical twin of a raspberry which can be used to develop robotic harvesting systems before deploying in the field. The sensorized raspberry has the capability of measuring the applied forces before and after it has been picked off the plant with a high sensitivity. The mechanical design was optimized and a material with properties similar to the real fruit was chosen, in order to achieve similar mechanical properties to a real raspberry, specifically the stiffness before and after picking and the pulling force. The paper concludes with a harvesting demonstration performed by a robotic gripper, where the sensorized raspberry is used to assess the quality of the picking action. This work aims to lay the groundwork for accelerating the future development of robotic harvesting systems to enable robust development in a lab before deployment in the field.
Bio I am a 1st year PhD student at the CREATE Lab (EPFL) working on dexterous robotic manipulation. Originally from Kyoto Japan, I studied engineering (focus on robotics and informatics) at the University of Cambridge, UK for both my bachelors and masters before coming to EPFL. Since a young age, robotics prototyping has been my passion and hobby. At EPFL I have been working on projects related with the fabrication of robot hands, sensor design and characterisation, low level motor control, and optimisation, tying in the practical skills from my hobbies and theoretical background from my past studies.
Talk 2: Soft passive swimmer optimization: From simulation to reality using data-driven transformation, by Nana Obayashi (CREATE-LAB, EPFL)
Abstract Soft, bio-inspired robotic swimmers are showing significant potential in terms of efficient motion and maneuverability. However, modeling and understanding the fluid-structure interactions between compliant soft bodies and water is highly complex, limiting our ability to optimize or understand the effect of both design and controller parameters. We propose combining simulation of soft passive swimming structures with experimental data to improve the accuracy of the simulation by identifying the transformation which best maps the simulation to this experimental data. This allows us to leverage the physics that are captured by the simulations whilst closing the sim-to-real gap by using a limited amount of experimental data. We use this approach to model a simple, modular robotic system based upon passive tentacles and show how we can close the reality gap and optimize the design of the tentacle structures. This optimized structure is used to create a full robot swimmer, where the optimized tentacles can be used to create a robot with a swimming speed of 6.2 cm/s, and can introduce a rudder like 'deflector' to also control the direction of the robot's motion.
Bio Nana Obayashi is a first year PhD student at the CREATE Lab, working with Prof. Josie Hughes. She has bachelor’s and master’s degrees in aerospace engineering from Georgia Institute of Technology, as well as industry experience as an aerodynamics and flight performance engineer. In her PhD, she is focusing on the intersection of fluid dynamics and robotics so we can better design robots that efficiently exploit the environment.
Practical information
- General public
- Free
Organizer
- MEGA.Seminar Organizing Committee